


L'introduction de produits: Le contenu cachée 1. Système anti-collision de tour 2. Système anti-collision de grue de chenille ..
La guerre de coopération intelligente installée sur le chantier de construction, la formation, l’affichage, le niveau, la table de maintenance, il existe des zones de travail transversales, afin d’assurer que ces équipements fonctionnent en toute sécurité et efficacement dans les zones de travail réparées, pour éviter les accidents et les blessures causées par la collision. Reiter lance le système de protection multi-équipement. Ce système vise à empêcher les collisions des véhicules dans les zones de travail transversales par des moyens intelligents, à améliorer l’efficacité du travail sur le site et à assurer la sécurité des équipements et du personnel.
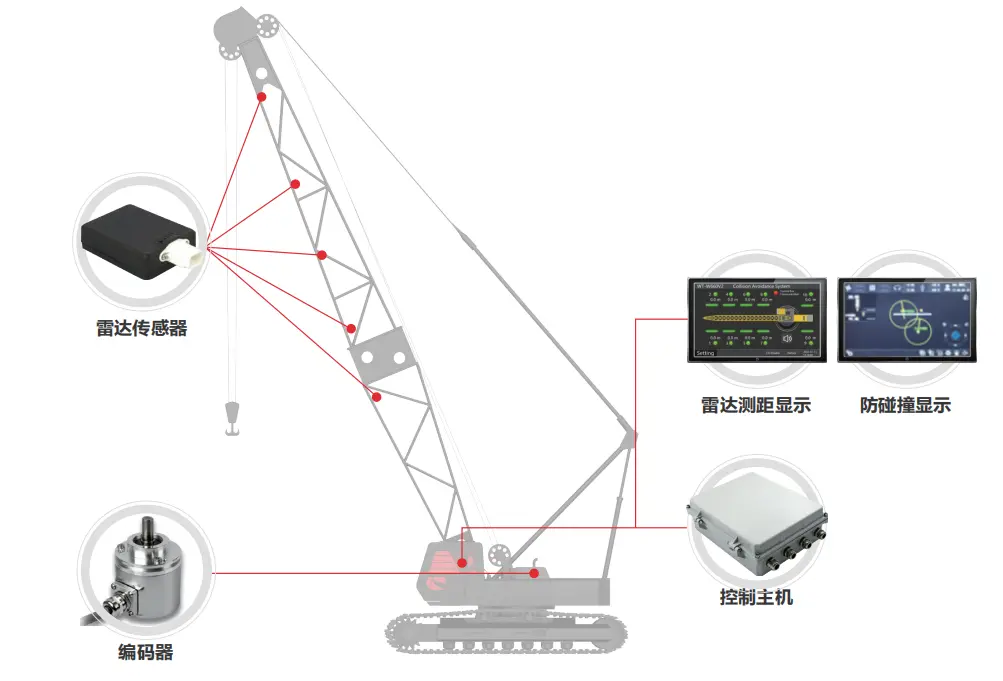
Par le dispositif de surveillance hôte radar avec une seule fonction de fabrication du signal, détecter s’il y a des obstacles dans l’espace de la zone, afin d’éviter les véhicules et le réseau de voiture, en raison de la collision signalent d’autres objets, le pont et les objets environnants si l’espace de la zone est sûr. Alarme sonore et lumineuse dans la zone de sécurité et l’intrusion, même par le signal de contrôle de la poussière, pour réaliser la surveillance active anti-collision pour garantir la sécurité de l’équipement.
Utilisant la technologie de capteur de radar d’ondes millimétriques, par la conception d’antenne multi-émission et multi-réception, détection précise des obstacles à moins de 0.5-30 mètres (le câble en acier de 15mm minimum peut être identifié), distance d’acquisition en temps réel, vitesse
Degrés, angles et autres paramètres. Le système se compose d’un hôte de contrôle principal, d’un capteur radar, d’un terminal d’affichage et d’un module de mise en réseau. Il supporte la transmission de données CAN bus pour assurer la stabilité du signal.
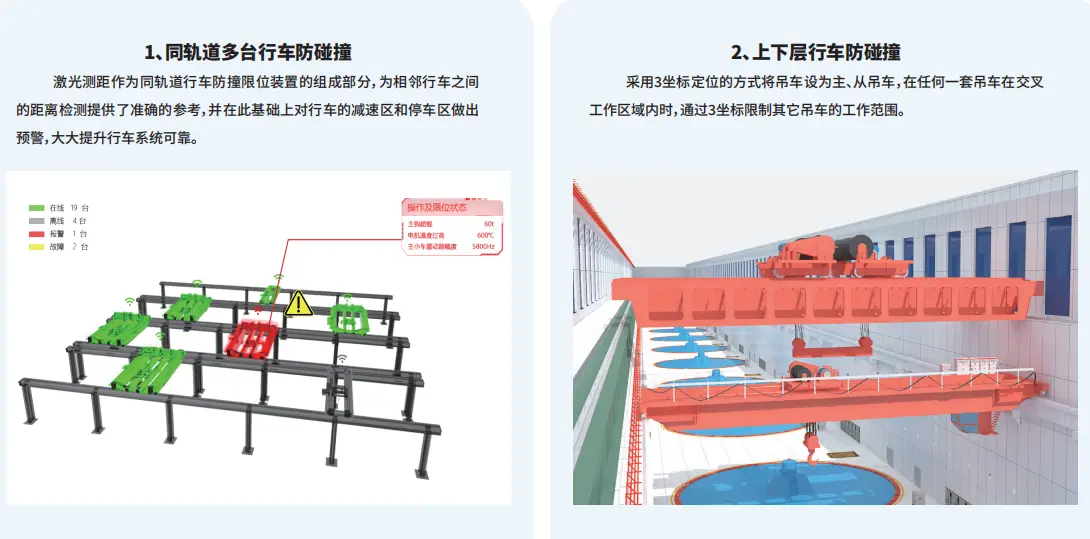
Anticollision synergique entre grues à tour
Grâce à la mise en réseau du pont sans fil, les données de position et de mouvement de plusieurs grue à tour sont partagées en temps réel. Lorsque la distance entre les deux grue à tour entre 15~30 mètres, les instructions d’arrêt sont automatiquement sorties lorsque 5~10 mètres.
Reconnaissance intelligente des obstacles
Avertissement à 10 mètres et arrêt à moins de 5 mètres pour les grands obstacles tels que les bâtiments, les grues de voiture et les grues à chenilles; Soutenez la limite de zone d’opération et empêchez la grue de pénétrer dans les routes, les zones résidentielles et d’autres zones à risque.
Adaptation aux environnements difficiles
Il a la capacité de résister au brouillard, à la poussière et aux interférences électromagnétiques. Il supporte - 20℃~70℃ opération à température large pour répondre à tous les besoins de construction.
Alerte et contrôle proactifs
Alarme sonore et visuelle en temps réel combinée avec le contrôle graduel (décélération → arrêt), l’interface d’exploitation prend en charge les paramètres de réglage personnalisé, adapté à différents modèles de grue à tour.
Conformité et commodité
Fournir des garanties de qualification telles que le certificat d’essai de type limiteur de couple. Le capteur adopte une installation non destructive avec une carte en U pour soutenir le démontage rapide et le multidéploiement entre les sites.
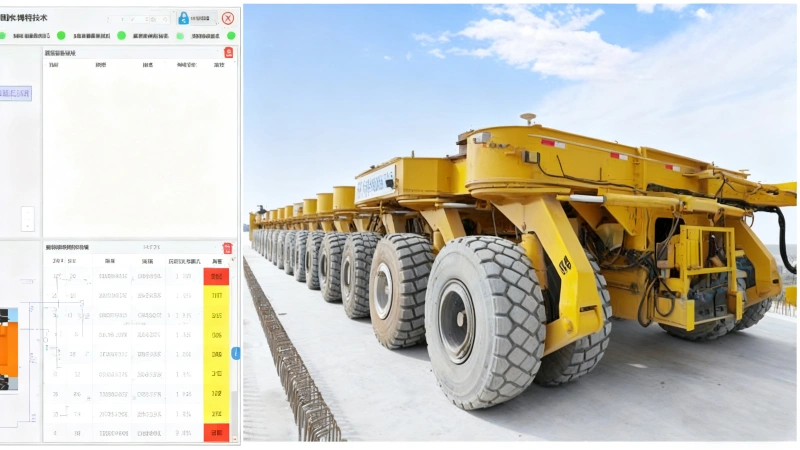
Les chariots élévateurs, en tant que moyens de transport de base, sont exposés à un environnement de travail complexe et variable et à des risques de sécurité élevés lors des opérations avec des engins de levage spéciaux. La manière traditionnelle d’anti-collision qui dépend de l’observation manuelle a des problèmes tels que le champ visuel limité et le retard de réponse. Il est difficile de faire face aux obstacles dynamiques (tels que les piétons, l’équipement). Il est facile de provoquer des accidents de collision et de menacer la sécurité du personnel et le fonctionnement de l’équipement. Avec la croissance du volume d’affaires, le besoin de sécurité de conduite et d’intelligence est urgent. Il est urgent de réaliser une surveillance précise et une protection active par la mise à niveau technologique.
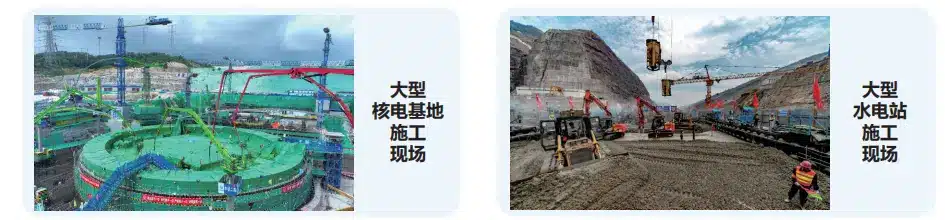
Ce système est principalement divisé en deux parties de conduite anti-collision de plusieurs unités sur la même voie et de conduite anti-collision supérieure et inférieure.
(i) architecture technique de base
Système de balayage lidar
(1) lidar de haute précision est installé aux deux extrémités de la poutre principale (une seule unité couvre un rayon de 20 mètres, une précision de ±2cm), 360° espace hémisphère balayage, collecte de données de nuage de points en temps réel pour construire un espace 3d
Modèle, identification précise de la position d’obstacle, de la distance et de la piste de mouvement.
(2) préréglage de trois niveaux de zones de sécurité: zone d’information (1m), zone d’avertissement (0.8m), zone d’alarme (0.5m), ajustement dynamique des paramètres d’arrière-plan de soutien (mot de passe de sécurité requis).
Système intelligent de surveillance vidéo
Déployer quatre caméras hikvision hd pour couvrir la piste de conduite, la zone de fonctionnement de la grande voiture et le dessus, soutenir la zone de risque de collision automatiquement amplifiée et commutée. La vidéo est synchronisée en temps réel à l’écran de la cabine du conducteur, l’enregistrement vidéo est sauvé pendant 72 heures pour la vérification.
Alarme sonore et visuelle avec gestion des données
Alarme sonore et visuelle à plusieurs niveaux
Avec la distance décroissante, le message vocal "avertissement" "attention" "arrêt", la fréquence augmente progressivement; Alarme sonore et visuelle en temps réel pour défaillance radar.
Données et statistiques
Enregistrez automatiquement le temps d’alarme, l’emplacement et le type. Soutenez la requête de données historiques de 15 jours.
Ii) avantages du système
La conception modulaire
Compatible avec le système de contrôle de conduite existant, facile à installer, peut étendre la surveillance collaborative multi-radar.
Résistance aux interférences
Lidar n’est pas soumis aux interférences électromagnétiques et s’adapte à l’environnement industriel complexe. Avec la complémentarité vidéo, il peut réduire l’impact du mauvais temps.
Visualisation en 3d
L’écran de la cabine du conducteur présente le profil 3d de l’environnement environnant et la dynamique des obstacles en temps réel. La zone aveugle est clairement visible.
01 détection de position
Obtenez des informations précises sur la position tridimensionnelle de chaque grue en utilisant une variété de capteurs tels que la hauteur, l’amplitude et le capteur de rotation. Ces capteurs permettent une rétroaction en temps réel des changements dynamiques de l’appareil, assurant ainsi une perception globale de l’environnement par le système.
02 systèmes d’échange d’informations

Grâce au module de communication lan, les informations de position et les instructions de fonctionnement peuvent être échangées en temps réel entre le grue à tour et le grue à chenilles. Ce mécanisme efficace d’interaction des données garantit que tous les appareils sont mis à jour simultanément dans la même fenêtre de temps, ce qui réduit les retards d’information et les risques d’erreurs de calcul.
03 système de traitement à distance
En tant que «cerveau» du système, l’ordinateur industriel est chargé de traiter les données des différents capteurs et de construire des modèles tridimensionnels grâce à des algorithmes sophistiqués. Lorsque le risque potentiel de collision est détecté, le contrôleur industriel émet immédiatement une alarme sonore et visuelle et un ordre d’arrêt de sortie pour s’assurer que l’équipement s’arrête à temps pour éviter les accidents.
04 système interactif du personnel

Le système est équipé d’une interface opérateur intuitive qui permet à l’opérateur de surveiller l’état de l’équipement en temps réel et de voir les enregistrements d’alarme et les données historiques via l’écran tactile ou un terminal à distance. En outre, le système prend en charge l’envoi de données au serveur via le réseau 4G pour la gestion et la maintenance à distance.
Article suivant:Limiteur de couple de levage maritime: patron de la sécurité des opérations maritimes »