

你们防碰撞系统这么多,激光的、微波的、空间算法的……到底哪款才适合我们呢?”最近不少客户朋友发来这样的疑问。其实不用犯难,微特的每款防碰撞系统都有“专属适配场景”,今天就用通俗的解读,帮你快速选对解决方案,让起重作业安全又高效。
微特防碰撞系统基于三类核心技术研发,各有明确技术侧重与性能特点,精准匹配不同作业需求:
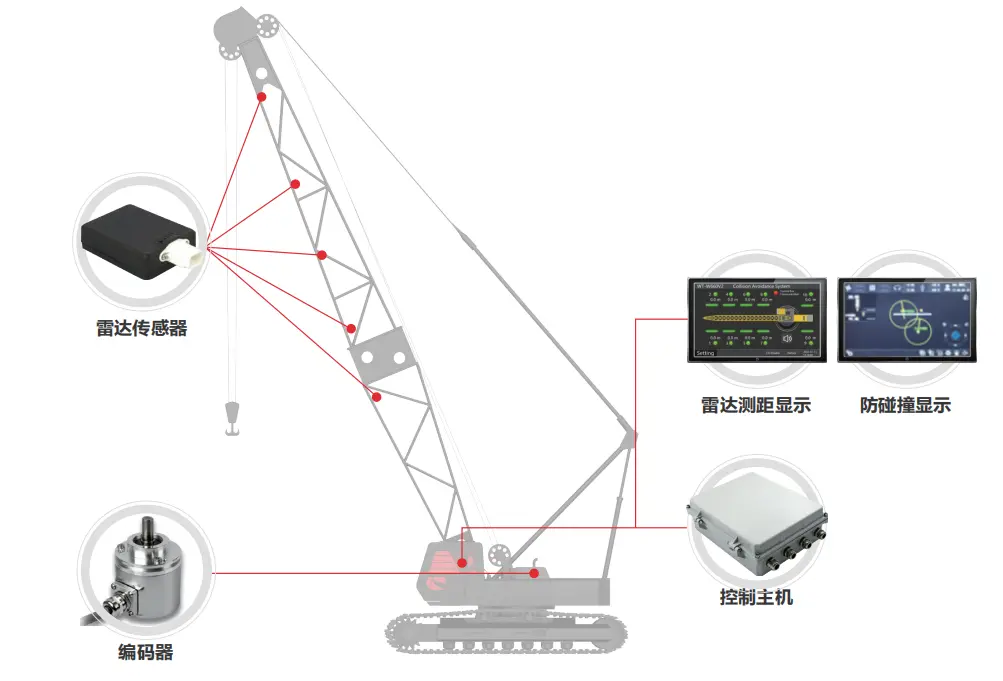
技术核心:采用非接触式微波测距技术,通过无线电波实现距离、速度、方向的实时监测,0.1秒内完成动态数据运算。
关键性能:抗干扰能力强,不受电磁、雨雪、烟雾、粉尘等环境因素影响,黑暗或不良照明条件下可正常工作。
突出优势:体积小巧,安装便捷且成本可控,无需复杂调试,适配多种机型的快速集成。
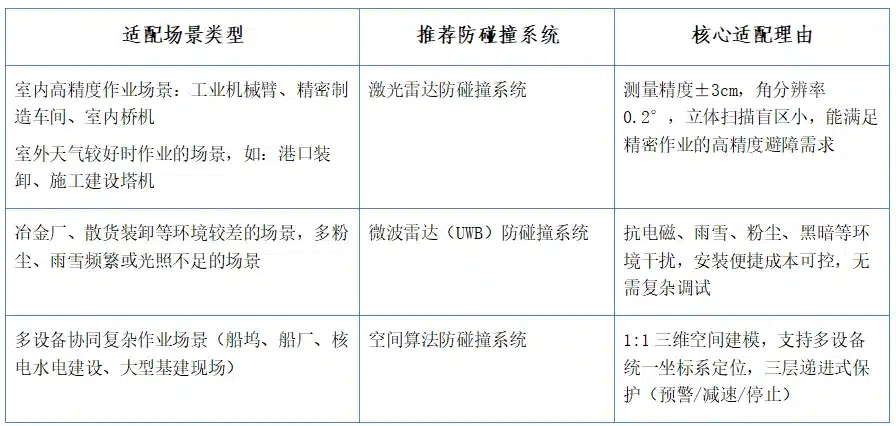
适用场景:冶金厂、散货装卸等环境较差的场景,多粉尘、雨雪频繁或光照不足的场景。
应用实例:
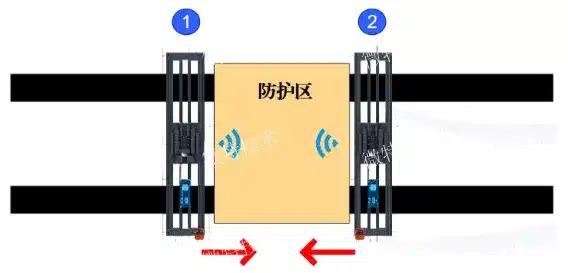
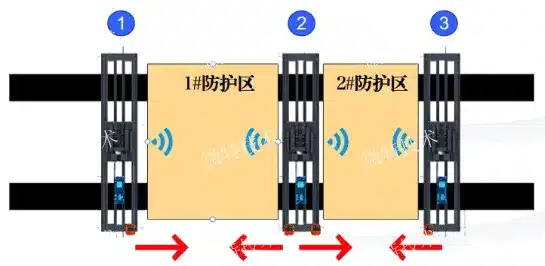
天车防碰撞系统:可避免同轨道或上下层天车之间的防碰撞,点击详情

塔机防碰撞系统:避免塔机与塔机之间的防碰撞,点击详情

吊车防碰撞系统:避免吊车大臂与其他物体之间的碰撞,点击详情


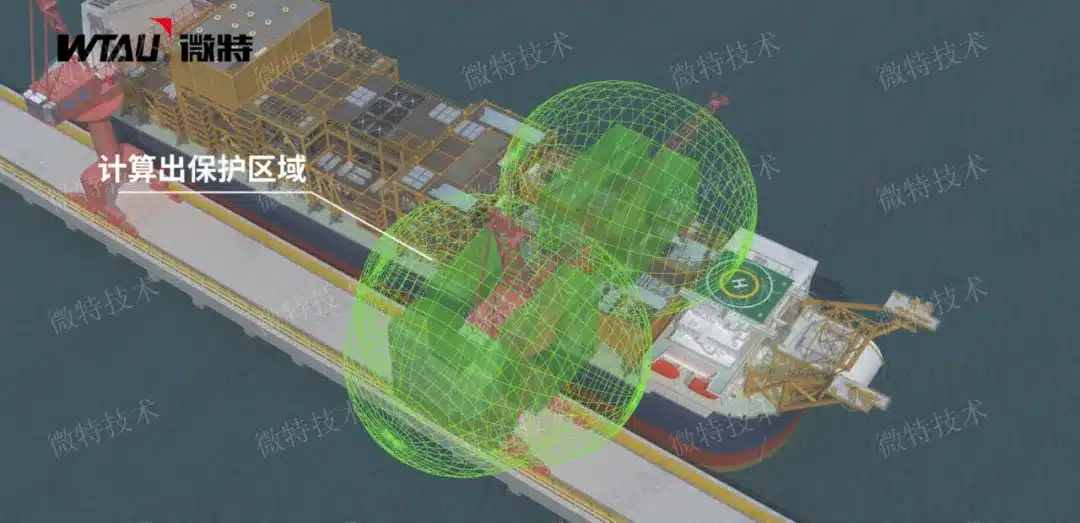
技术核心:基于“空间建模+实时计算”,按1:1比例构建场地与设备三维模型,通过统一坐标系实时更新设备位置,计算部件间最近距离。
关键性能:监测距离灵活可调,抗干扰能力强(几乎不受环境影响,仅北斗定位状态影响),支持多设备协同避障。
突出优势:可实现预警、减速、停止三层递进式保护,适配复杂动态场景下的多设备交叉作业。
适用场景:船坞、船厂、核电水电建设、大型基建现场等存在多台起重设备交叉、穿行、联吊的场景。
应用实例:
多塔协同防碰撞:可避免“多塔群”作业的复杂环境下的防碰撞,点击详情

码头船厂三维防碰撞:针对复杂情况,如港口码头上的龙门吊、门座机、桥机、船体之间的防碰撞,点击详情

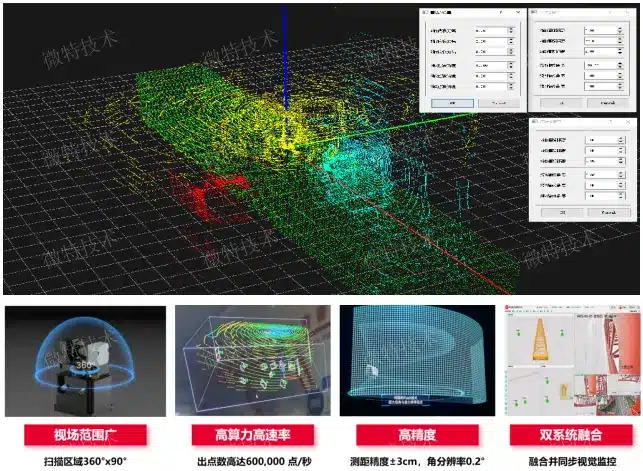
技术核心:以“激光测距 + 点云处理”为核心,通过多线激光扫描获取三维点云数据,结合聚类、目标识别算法精准识别障碍物轮廓。
关键性能:测量精度高,可达±3厘米,分辨率达0.2°,视场范围广,可360°×90°立体扫描,盲区小。
注意事项:对环境洁净度有一定要求,雨雪天气可能影响探测效果。
适用场景:工业机械臂、室内桥机、精密制造车间等环境洁净、对精度要求高的场景,室外天气较好时作业的场景,如:港口装卸、施工建设塔机。
应用实例:
中核“玲龙一号”起重机行走区域防碰撞,系统可精确识别直径5cm钢管闯入防碰区,点击详情

上一篇:« 防起重机冲顶、过卷的装置,起升高度限制器
下一篇:十五年耕耘路:从生产一线到销售战场的蜕变 »
24小时咨询电话:0717-6922999 微信:13972023522(薛工) 邮箱:technical@wtauserver.com 地址:中国(湖北)自贸区宜昌片区港城路6号
Copyright @ 2026 微特技术有限公司 版权所有 ICP备案编号:鄂ICP备12004023号-1